Ha kisebb a csapat egy óceáni vitorlástúrán, akkor az önkormányzás feltétlenül szükséges, de például Joshua Slocum kapitány, aki először kerülte meg a Földet egyedül sem használt semmilyen ‘self-steering’ rendszert. Amikor pihent, akkor a hajó tartotta az irányt vagy ha nem tudta úgy beállítani a hajót, akkor ‘heaving-to’-t alkalmazott.
Amikor Carinával egyedül kerültem meg a Földet, sokszor sokat nem működött az autopilot és én így úgy csináltam, mint Slocum kapitány… de ezek a módszerek nem annyira kényelmesek.
A ‘self-steering’-nek kétféle módja van:
- Wind vane self-steering
- Electronic autopilot
Wind Vane self-steering: egy mechanikus szerkezet (egyszerű) és nem használ elektromosságot. Szélcsendben és gyenge szélben és motorozás közben nem működik, de nagyon megbízható az óceáni vitorlázásokon. Pl. kisebb hajókra nagyon ideális. Ez a mechanikus eszköz, amely (a kialakítástól függően) akár a vitorlás saját kormányával, akár saját külön kormányával kormányoz. Miután a hajó a kívánt irányba vitorlázik, a lapátot (vane) a szél irányához kell igazítani. Ha a vitorlás elkezd eltérni az iránytól a szélhez képest, a mechanizmus ismét visszakormányozza. Számos típus van a piacon, de akár lehet építeni is. Még 2013-ban Dournanez-ben egy francia barát mutatta meg a sajátkészítésű szélkormányát (100%-ban házi gyártmány), amit 6,5 méteres hajóján (Muscadet) használt még óceán átkelésre is. Ki is próbáltam a vizen és nagyon jól működött. Itt a terv. Bár viszonylag nehéz és drága a szélkormány, de megbízhatóak és nem fogyasztanak áramot! A szélhez képest kormányoznak, így ha a szél iránya megváltozik, akkor a hajó iránya is megváltozik. Előnyös a nyílt óceánon, mert a hajó AWA-ja állandó marad (pl. kicsi az esélye annak, hogy a vitorlás spontán halzizni fog). A part vagy más vízi jármű közelében azonban az irányt folyamatosan ellenőrizni kell.
Egy ajánlott bemutató videó a témáról:
Az elektromos autopilot: nagy energiaigényű, ezért szükséges a hajóra napelem vagy szélgenerátor vagy hydrogenerator, ha rendszeresen használjuk. Érdemes egy erős és megbízható autopilotot választani. Hosszabb utak esetén érdemes, hogy kettő auopilot is legyen a hajón és esetleg tartalék alkatrészek is (pl. motor). Fontos beállítások: Rudder Gains szint / Response szint és Compass mode vagy Wind mode. Ha saját hajód van, akkor érdemes jobban ismerni az autopilotot (auto learn, compass calibration stb.). Carinán a szóló földkerülésem (2006-9) során a legegyszerűbbet használtam: Simrad TP 10 és Felicty-n (Mini 650 / MiniTransat) pedig Raymarine Smartpilot X autopilotot használtam 2012-15 között. Ezek a célnak teljesen megfeleltek! Ha a ‘compass’ módban használjuk az autopilotot, akkor figyelni kell a szélváltozást, mert akkor újra kell állítani a vitorlát. Illetve nagyon kell figyelni a ‘spontán halzira’ is.
Van persze egyszerűbb megoldás is, de ez nem annyira stabil és megbízható:
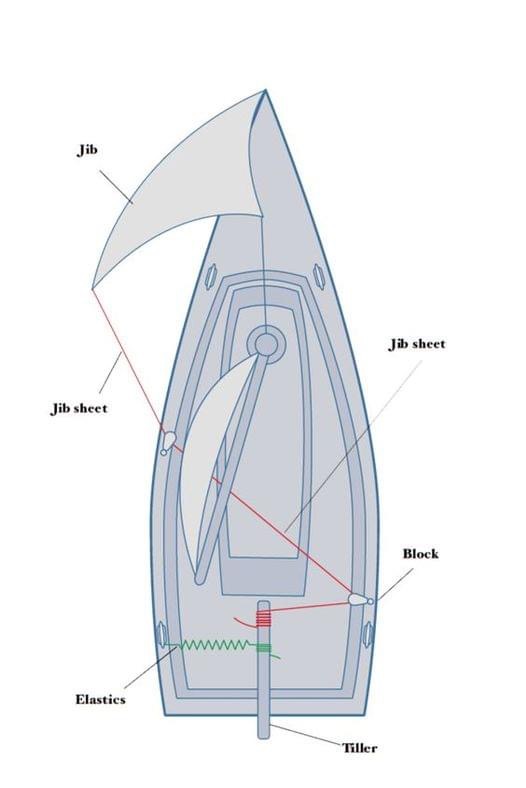
Volt olyan vitorlázó barátom, aki több óceán átkelést ezzel a módszerrel vitorlázott végig (25 éves), és működött!
work-in-progress…